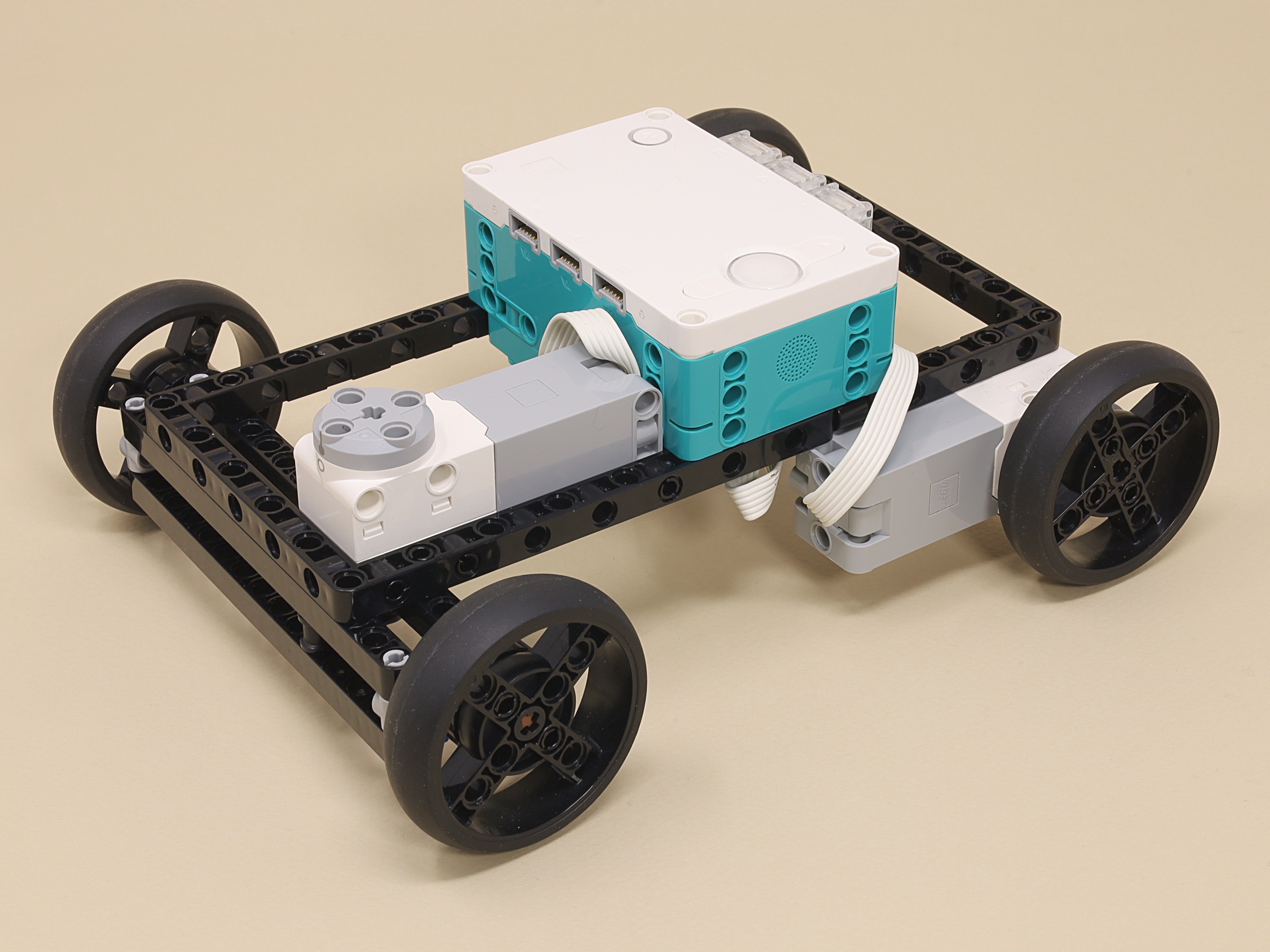
| If you want a four-wheeled robot
that steers like a car, here is a simple design that you can use
or build upon. Because it uses two rear drive motors, it steers
best if you apply "steering" (different motor speeds) to the
rear wheels in addition to angling the front wheels.
Two programs are provided. The autonomous
program has custom My Blocks to go straight and steer, which you
can easily use to program your own motions. A remote control
program is also provided. |