Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
| Claw Striker |
|
![]()
1-14
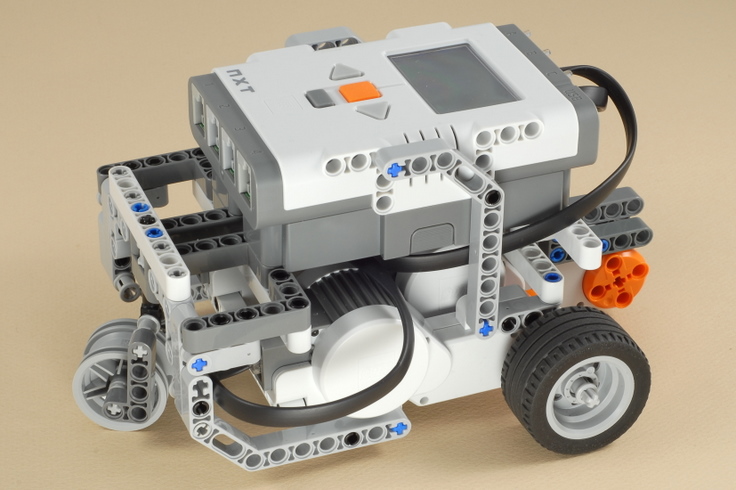
| Start by building the 3-Motor Chassis. Click the picture for building instructions. |
|
|
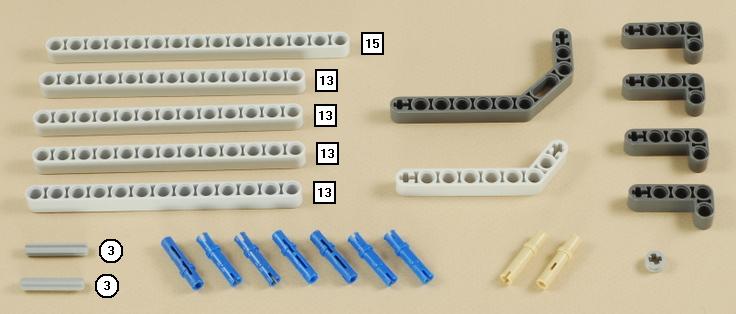
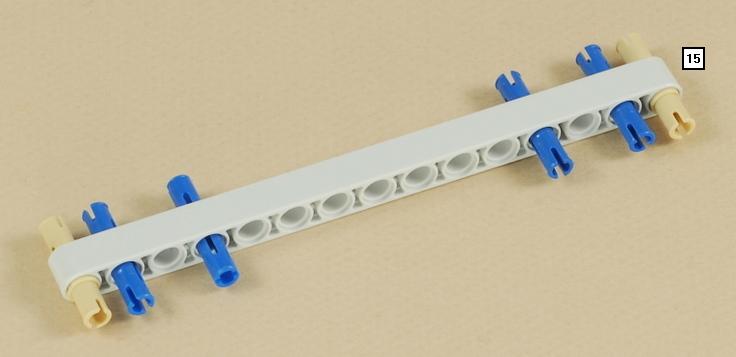
15

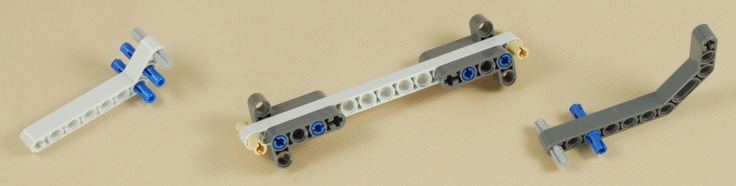
16

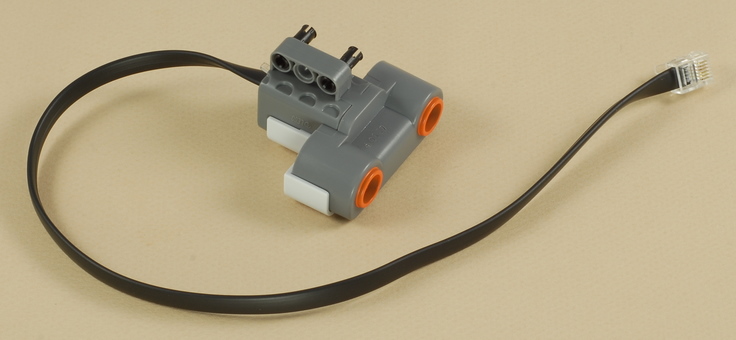
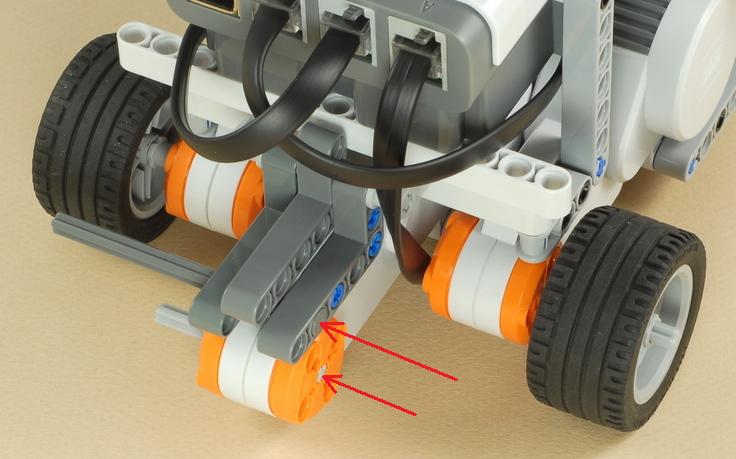
| Plug the wire for the ultrasonic sensor into port 4 on the NXT, routing it through the chassis brace as shown to keep it out of the way. |

17

| Claw
Striker Programming The ClawStrike program will make the Claw Striker try to automatically find a target and then strike it.
|
Challenges
|
|
Copyright
©
2007-2011 by Dave Parker. All rights reserved. |