Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
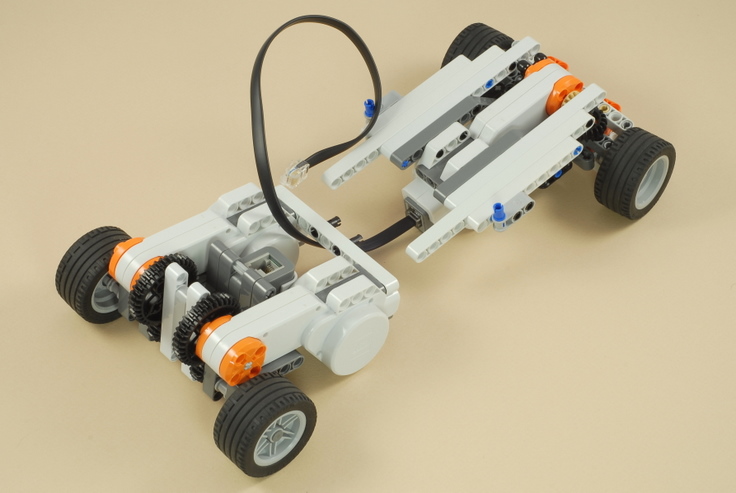
| Race Car |
|
![]()
1

2



3
4

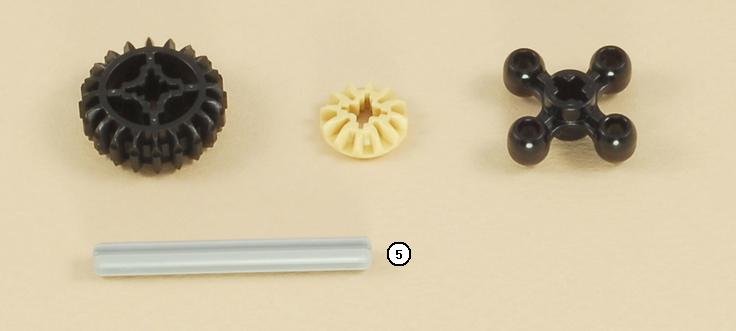
5

6

7

8
9
10
11

12
13
14


15

16



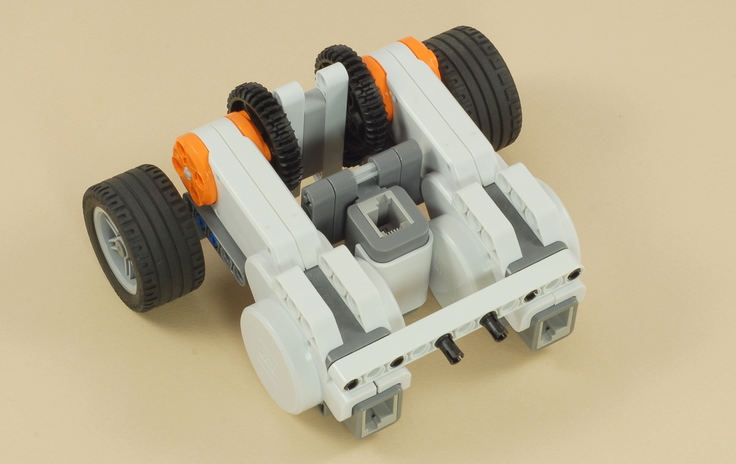
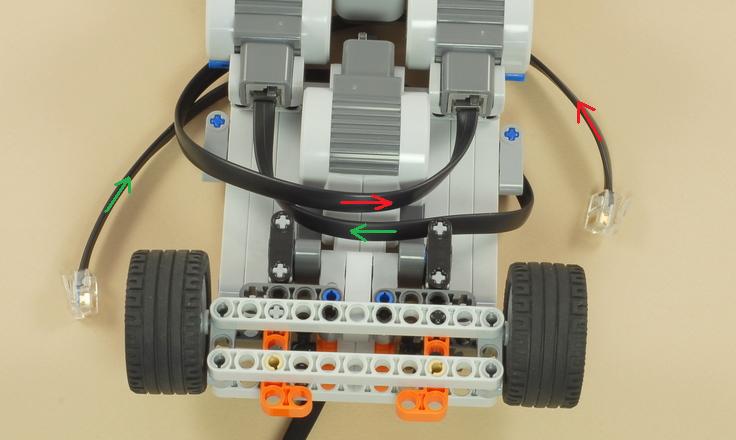
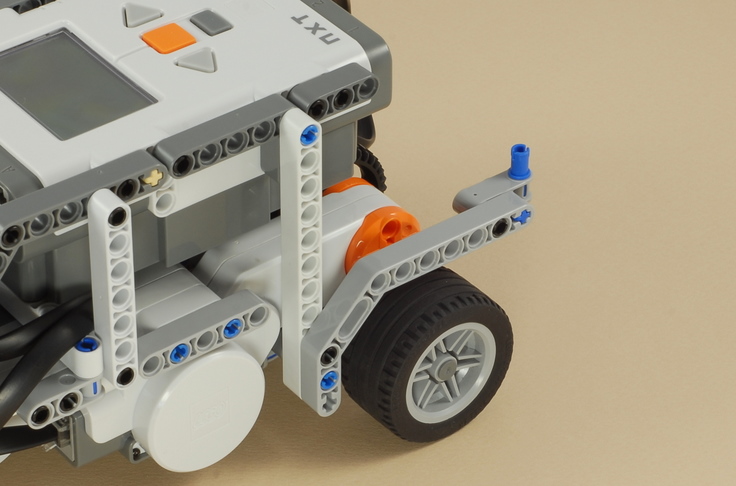
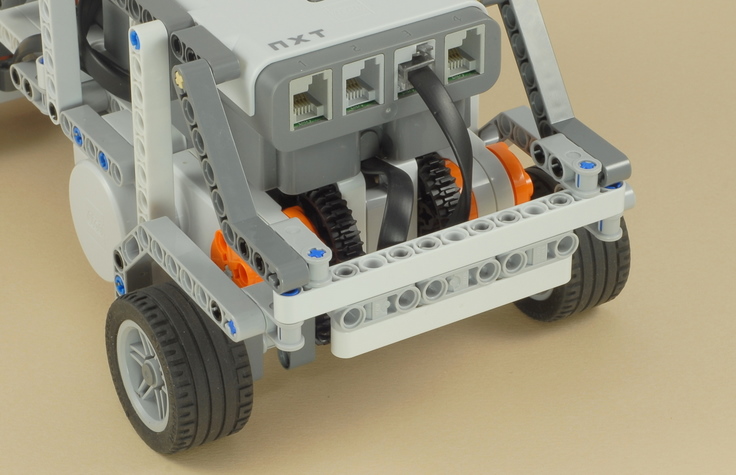
| The color sensor wire should come out of a gap under the center rear of the NXT. Connect it to port 3 on the NXT. |
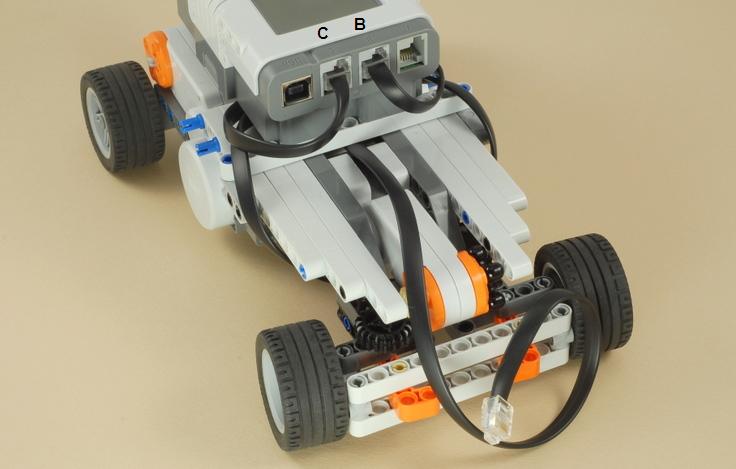
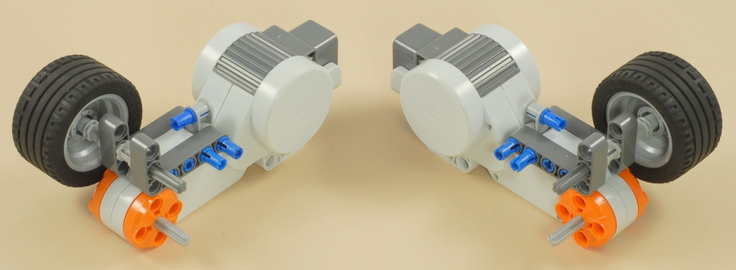
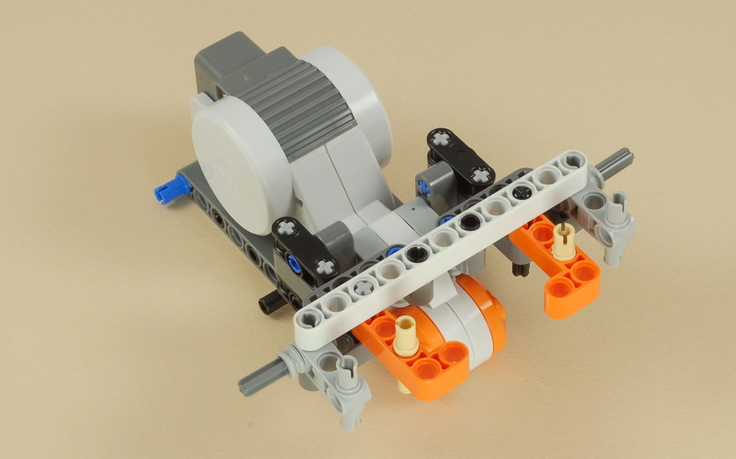
| The two drive motors connect to ports B and
C on the NXT. The wires should be crossed twice (once under
the NXT and another time under the car), so that the B motor stays on
the left side of the car and the C motor is on the right side.
The steering motor wire should come out of a gap under the center front of the NXT. Wind the wire a couple of times to make it store compactly (it will be hidden behind the windshield built later) and then connect it to port A on the NXT. |

17


18


19


20
21


22

| Race
Car Programming Four programs are provided for the Race Car: two for single-NXT use, and two Bluetooth control programs designed for use with the 5 Button Remote Control and Steering Remote Control projects (second NXT required). Single NXT Programs:
Bluetooth Control Programs (Two NXTs Required):
|
Challenges
|
|
Copyright
©
2007-2011 by Dave Parker. All rights reserved. |