Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
| Path Measurer |
|
![]()
| This project gives you a way to easily plot and
measure a path that you want your robot to navigate using Move and Motor
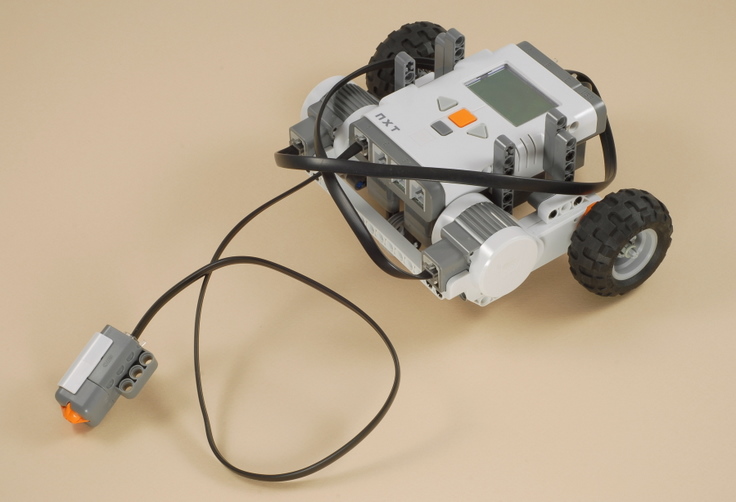
blocks that use Degrees as their duration. You start by guiding
the robot along the desired path using a simple wired remote control
that can be connected to any robot that uses 2-motor drive. Then
you can read the degree measurements that are displayed on the NXT
screen and use these measurements to configure Move and Motor blocks in
your own programs that will get the NXT to duplicate that path on its
own. Two different programs are provided. In the first program, you can select from three movement directions for each segment of the path using the three buttons on the NXT: straight forward, or one-wheeled turns to the left and right. In the more complex alternate program, you can select from eight different motions including one-wheeled turns, pivot turns (wheels turning in opposite directions), reverse turns, and straight backward motion.
|
|
|
|
|