Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
| Modular Test Vehicle (MTV) |
|
![]()
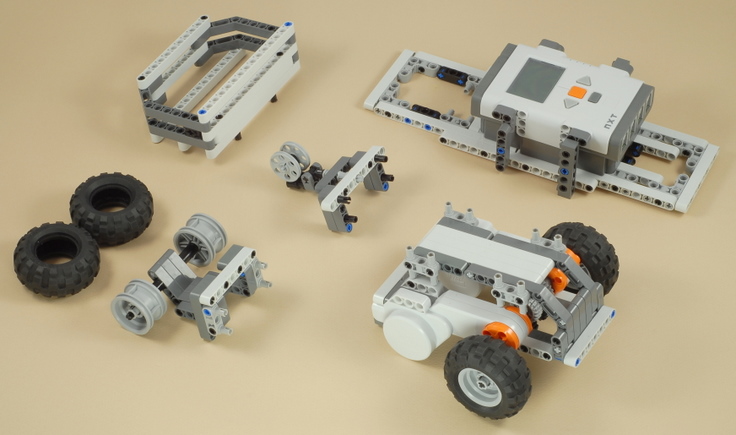
| This project shows you how to build a Modular Test
Vehicle (MTV) that can be easily reconfigured (changed) to use different
wheel types, chassis layouts, and gear ratios. You can use this
project to easily experiment with how different configurations affect
the driving, turning, load carrying ability, accuracy, and consistency of the vehicle. "Modular" means that the design is split into five chunks that can be built separately: the Frame, the Drive Wheels, rolling Straight Wheels (with or without tires), a Castor Wheel, and a Payload Basket. These modules can then be snapped together in seconds to form a complete vehicle that you can test. Then you can quickly reconfigure it to make a change and test it again to see if it drives any more accurately, turns better, etc. You can use what you learn from these experiments to help you design your own robot that performs the way you want it to. There are literally hundreds of possible ways to combine the modules into a complete vehicle. Some examples are shown below. Each of these vehicles can be built in under one minute by snapping the modules together.
|
|
|
|
Copyright
©
2007-2011 by Dave Parker. All rights reserved. |










