This design adds on to the
Steering Car to make a
robot car that will locate and measure a parking space using the
distance sensor and then either parallel park into it or back in
perpendicular to the space, depending on how long the space is.
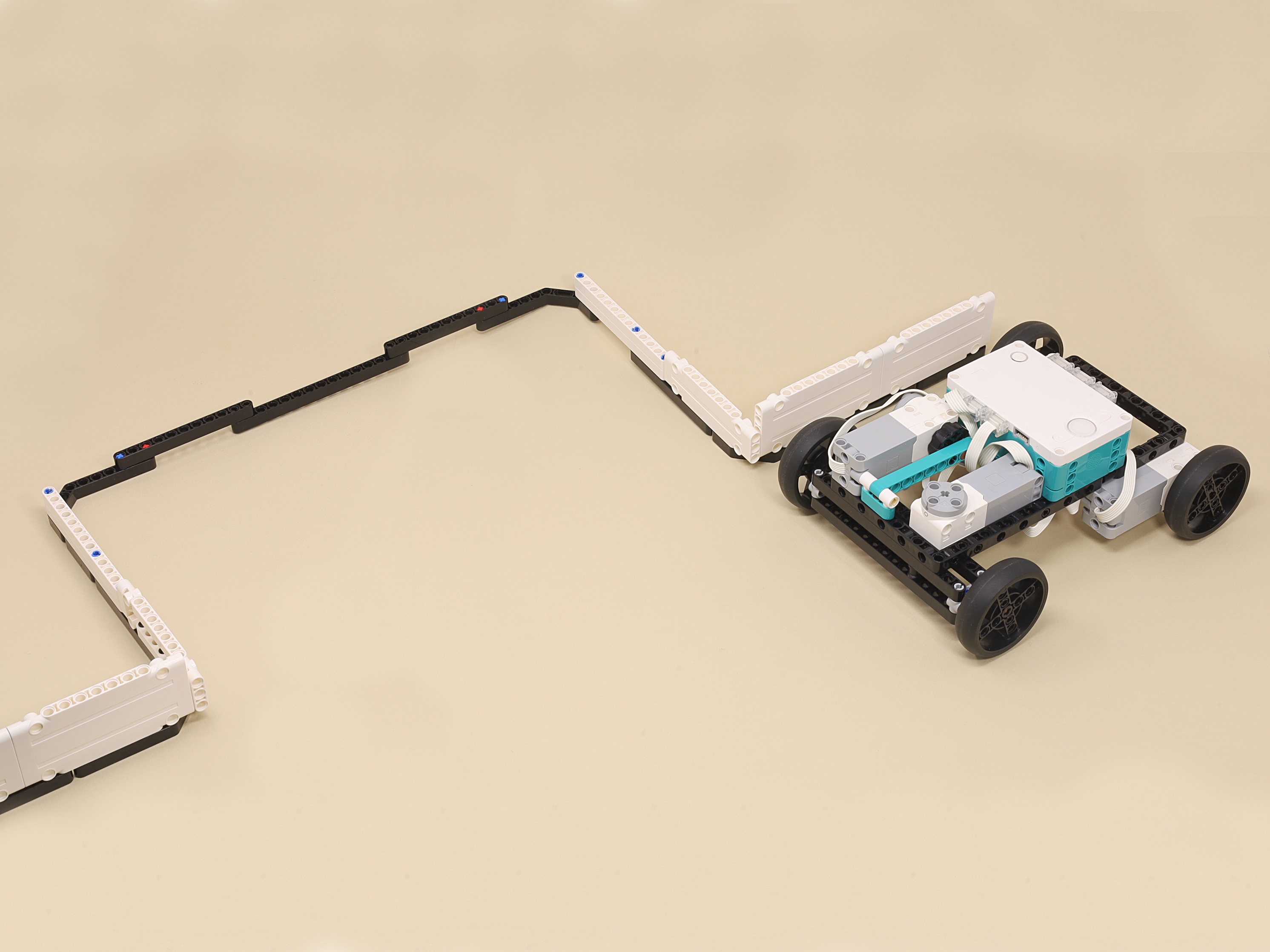
Distance sensor locates
and measures the parking space
Ready to find the space
Space found and
measured
Starting
to parallel park
Done parallel parking
Car backs in perpendicular
if the space is too short
to parallel park in