|
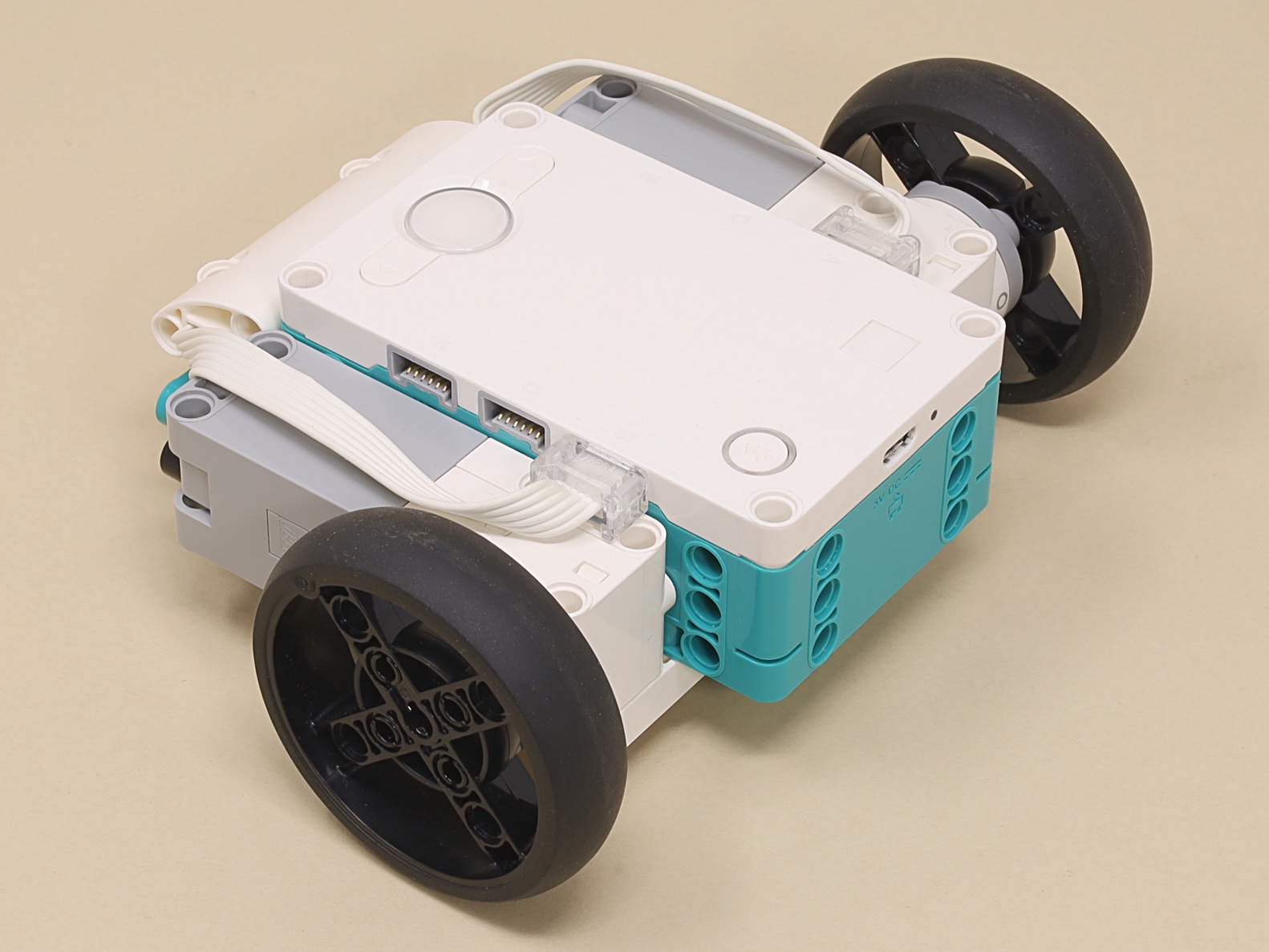
This very simple robot has the basic
layout of a classic driving robot: two drive wheels near
the front of the robot, and a small drag wheel in the
back. It is also low to the ground, level, and
well-balanced with about 75% of the robot's weight on
the drive wheels.
You can use this design to practice
driving programs and as a base to add things to.
An example autonomous program and an
example remote control program are provided to get you
started. |